サル型ロボット、月に降り立つ? 独で開発進む
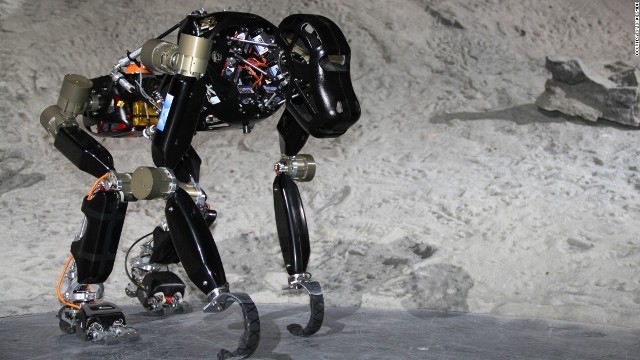
ドイツで開発が進む月探査用サル型ロボット「iStruct」=DFKI提供
(CNN) 月探査への関心が再び高まっている。月面上に高濃度で存在するとされるヘリウム3について、将来核融合発電所用の燃料に利用できるとの観測が出ているためだ。実際の探査では、コストなどの観点からロボットの活用が見込まれる。ドイツで開発が進むサル型ロボットを取材した。
「チャーリー」の愛称で呼ばれるサル型ロボット(正式名称は「iStruct」)の開発に取り組むのは、ブレーメンにある独人工知能研究センター(DFKI)。同センターの研究者、ダニエル・クーン氏はサル型を選んだ理由として、「複数の移動方式の研究が可能になる」と説明する。4足モードで優れた歩行能力を発揮する一方で、直立状態の2足歩行もできるなど、姿勢や歩行形態を柔軟に変化させられる点が決め手となった。4足歩行は安定性で上回るが、平地での機敏な動きには2足歩行の方が適しているという。
チャーリーを開発する上での最大の目玉は、状況に合わせて最適な歩行形態を自ら選ぶ機能を搭載するというものだ。クーン氏は、「2足歩行で安定を保ちながら動くのが難しい状況では、自動的に4足歩行を選択する。動きやすい状況なら2足歩行により視界を広げ、周囲を見渡すことができる」と話す。
このプロジェクトはドイツ航空宇宙センター(DLR)の資金援助を受けている。これまでの経過はおおむね順調で、チャーリーは20度の傾斜を昇り降りすることができるようになった。現在DFKIは、4足歩行から2足歩行に切り替える具体的な方法を研究中だ。これによって2つの歩行形態の違いについて分析できるほか、人間が2足歩行へと進化した経緯に関しても手掛かりがつかめるのではないかと期待されている。