飛んで跳ねて登って 昆虫を模倣した小型ロボットの世界

アギトアリに触発されて生まれた「トリボッツ」/Zhenishbek Zhakypov
(CNN) ロボットといえば、大半の人は巨大ロボットか、少なくとも人間大のロボットを思い描くだろう。しかし、今、世界のロボット研究者たちが重点的に取り組んでいるのは昆虫ほどの大きさの(および昆虫よりも小さな)ロボットだ。
ロボット研究者らを昆虫型ロボットの研究に駆り立てているのは、昆虫の体の小ささだけではない。彼らは、ノミやハエといった6本脚の生き物の日常生活を構成する多くの複雑な作業や身体技能にも着目している。
ロボット開発の課題は、ロボットをどれだけ大きく、強力にできるかだけではない。ロボットがどれだけ小さく、賢いかも重要だ。単純なロボットの一団を指揮できれば、どんなことが可能になるか。飛んだり、水面を走り抜けたり、天井まで飛び跳ねたり、さらに群れで行動できるロボットが存在したら、一体どんな使い方ができるだろうか。
米カーネギーメロン大学の助教でロボット工学が専門のゼイネップ・テメル氏は、自身の研究室でこれらの疑問に取り組んでいる。
テメル氏によると、小さなロボットは医学的な応用に役立つ。例えばターゲットの部位への薬物送達や切開を伴わない単純な外科手術などだ。また小型ロボットは、地雷原などの危険な場所や、捜索救助活動でも人命を救えるかもしれない。
アリやミツバチのように連携可能な小型ロボットは、火星など他の惑星の探索にも適しており、未探査の危険な場所に人間が行く必要がなくなる。
これらは、バイオインスバイアード(生体模倣)ロボットの重要な応用例のほんの一部にすぎない。世界の主要なロボット工学研究室のロボット研究者らが、3対6本の脚を持つ昆虫の研究に注力しているのはそのためだ。
特にアリは人気の研究対象だ。アリは、大きくて自分たちよりも重い荷物を持ち上げ、森や砂漠の中を素早く移動できるし、協力して橋を作ったり、障害を乗り越えたりもする。
スイス連邦工科大学ローザンヌ校(EPFL)の再構築可能ロボティクス研究所(RRL)の創設者兼ディレクターのジェイミー・パイク氏の研究チームは、アギトアリを手本にした電池式で手のひらサイズのロボットを開発した。このロボットは環境への適応や共同作業が可能だという。
自然界のアギトアリは、通常アリが行うことは全て行う。また時速約145キロという驚くべき速さで強力なあごを動かし、その反動を利用して敵から素早く飛びのくことができる。
パイク氏の研究チームはこれと同じ仕組みを使って、各ロボットがさまざまな動きを行えるようにした。例えば、高く飛ぶ垂直跳び、遠くに飛ぶ水平跳び、障害物を飛び越えるための回転跳び、でこぼこ面の歩行、平面でのほふくなどだ。
アリと同様、各グループは完全に自律的に動くが、互いに通信し、簡単な送信機を通じて連携が可能だ。
小型で非常に簡素な自立型ロボットのもう一つの利点は、より大きなロボットに比べ価格が安いため、一部が消失したり、破損したりしても任務を遂行できる点だ、とパイク氏は語る。
昆虫の適応力をロボットに応用
なぜロボット研究者らはこれほどまでに昆虫を参考にしたがるのか。それは、昆虫は可能であることを証明する出発点になるからだ、とパイク氏は言う。
例えば、ノミのように自分の体長の100倍の高さまで飛び跳ねたり、垂直の障害物を登ったり(逆に降りたり)、てんとう虫のようにフルサイズの羽を小さく硬い殻の下に収納する、などが可能であることは昆虫が証明している。「これらは自然の最適化された設計だ」とパイク氏は言う。
また、あらゆる大きさのロボットにとっての最大の課題のひとつは、複雑な地面の上で真っすぐに立っていることだ。「ロボットは平らな面は得意だが、自然の地形はでこぼこなため、ロボットにとって(真っすぐに立つのは)難しい」とケース・ウェスタン・リザーブ大学機械工学科の助教キャスリン・ダルトリオ氏は指摘する。
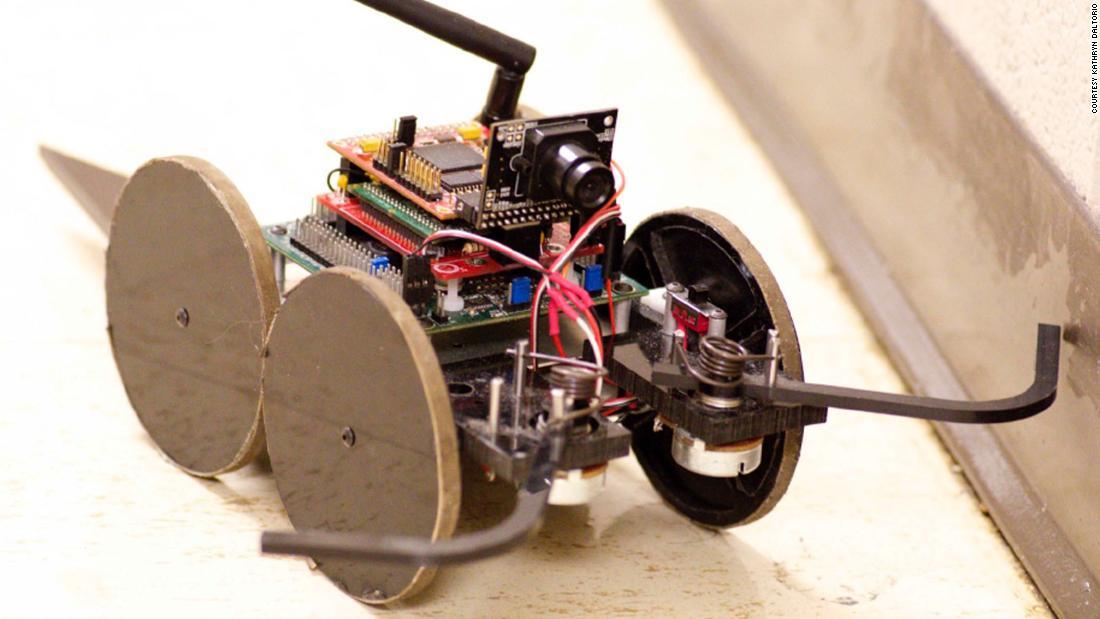
ゴキブリが歩く動作をまねた小型ロボット「ミニウェグ」/Courtesy Kathryn Daltorio
昆虫には6本の脚がある。ロボット的に言えば2組の三脚が付いているようなもので、非常に安定を保ちやすい。さらに昆虫は複数の脚に加え、さまざまな構造や素材を使って垂直面を横断する。ダルトリオ氏は、この特徴を研究し、模倣することにより、非常に簡素ながら見事なロボット「ミニウェグ」を作った。このミニウェグは、なんとモーターを1つしか備えていない。
動力と素材
人間が(まだ)唯一正確に再現できないのは、昆虫が生やしたり、排泄(はいせつ)したりする独特の素材だ。昆虫は、小さなつめ、とげ、粘着性の脚を駆使することにより、さまざまなことがこなせる。
ダルトリオ氏は、面ファスナーや、粘着テープ、工芸品のとげなどの人工素材はミニウェグに使用できたが、軽量で生分解性のある硬い外骨格など、他の素材の再現は難しい。ダルトリオ氏によると、現時点ではプラスチックと炭素繊維が安価で簡単な外装作りに役立つという。

水辺で新しいロボットの試験の準備を進める技術者/Courtesy Kathryn Daltorio
しかし、すべての昆虫が硬いわけではない。またロボット研究者たちは今、すべての動きを脚に頼るのではなく、芋虫のように体を変形させながら移動する柔らかいロボットを開発している。例えば、温度に反応する形状記憶合金を使えば、柔らかいロボットは丸まったり、転がったりすることができるが、加熱すると元の形に戻る。
小型ロボットのもう一つの課題が動力だ。充電式電池とソーラーパネルの2つが人気のある解決策だ。しかし、材料の問題と同様に動力についても、ロボット研究者らは材料科学、電池、ソーラー技術が専門の同僚たちと密接に連携しながら自立型ロボットの開発に取り組んでいる。
ロボットが昆虫と同じくらい賢く、機敏になるには、ロボット研究者らのさらなる研究が必要だ。
ダルトリオ氏は「小さなハエでさえ、非常に高度な反応を示す。その反応は速く、多くの知覚情報に対応できる」とし、さらに「(昆虫には)このような非常に豊富かつ適用可能な行動レパートリーがあるが、まだこれらをロボットに再現させることはできない」と付け加えた。